3D-Inspektionssystem für Abwasserkanäle
Für einen fahrbaren Kanalroboter wurde eine Auswertesoftware zur Erzeugung von 3D-Farbmodellen von Kanalrohren entwickelt. Diese Software verarbeitet die Farb- und Tiefendaten eines speziellen Sensorkopfes. Der Sensorkopf besteht
aus mehreren aktiven Stereokamerapaaren, die senkrecht zur Kanalwand ausgerichtet sind. Während der kontinuierlichen Durchfahrt durch das Kanalrohr wird die Kanalwand rundum erfasst, um später im farbtexturierten 3D-Modell automatisiert
nach Schäden, wie zum Beispiel Risse, Brüche oder Wurzeleinwüchse zu suchen.

Kapusi, D., Vehar, D., Jahn, R., Nestler, R., & Franke, K.-H. (2019). Multimodale Erfassung von Arbeitsräumen am Beispiel texturierter 3D-Innenrohroberflächen für die Kanalinspektion. 22. Anwendungsbezogener Workshop zur Erfassung, Modellierung, Verarbeitung und Auswertung von 3D-Daten „3D-NordOst“ (S. 79 ff.). Berlin: GFaI Gesellschaft zur Förderung angewandter Informatik e. V.
Kapusi, D., Franke, K.-H., Eisert, J., Künzel, J., Zimmermann, F., & Waschnewski, J. (Januar 2019). In den Tiefen Berlins – Assistenzsysteme zur Bewertung des Abwasserkanalsystems – Perspektiven durch BV und maschinelles Lernen in der Bildauswertung. Inspect.


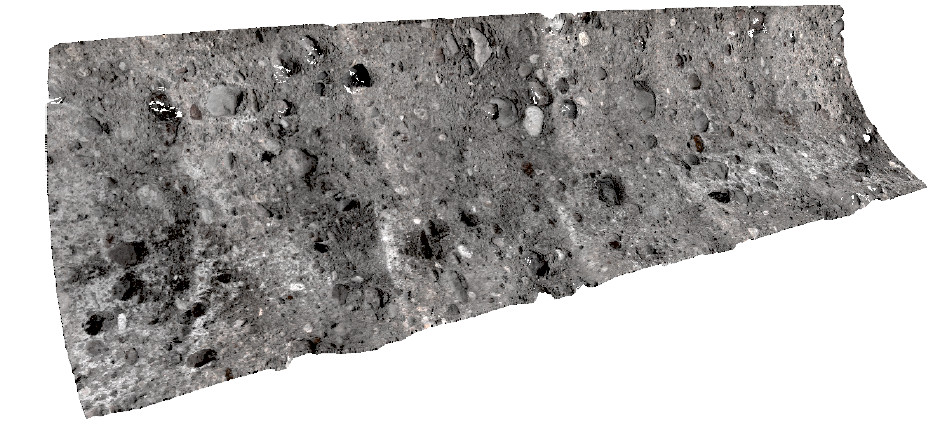




Weißlichtinterferometrie zur flächenhaften mikroskopischen Topologiemessung
Weißlichtinterferometrie ist ein berührungsloses optisches Messverfahren bei dem durch den Einsatz einer breitbandigen Lichtquelle im Gegensatz zur klassischen Laserinterferometrie eine absolute Bestimmung der Topographie einer Oberfläche ermöglicht wird. Der Aufbau besteht aus einer Kamera, einem Tubus und in der Regel einem Michelson oder Mirau-Objektiv. Der Messvorgang erfolgt scannend in Z-Richtung indem entweder das Objektiv oder das Messobjekt selbst durch den Kohärenzbereich bewegt wird, in dem die Interferenzen auftreten. Für jeden Kamerapixel wird separat das Interferogramm im Bildstapel lokalisiert und die Tiefeninformation bestimmt. Es entsteht eine Tiefenkarte mit einer Z-Auflösung im Nanometerbereich. Die Methode eignet sich auch für die Messung von rauen und unebenen Oberflächen, wie sie in der Mikro- und Nanotechnologie vorkommen. Aus den Tiefeninformationen lassen sich dann auch Materialkennwerte, wie z. B. Rauheiten bestimmen. Für die Nanomess- und -positioniermaschine des Sonderforschungsbereiches 622 wurde ein solcher Weißlichtinterferometrie-Messkopf und die dazu gehörige Mess- und Auswertesoftware entwickelt. Diese beinhaltet auch Stitchingverfahren, um großflächige Messbereiche Ausschnitt für Ausschnitt scannen und die jeweiligen Tiefenkarten zu einer Gesamtopologie fusionieren zu können.
Kapusi, D., Machleidt, T., Franke, K.-H., & Jahn, R. (2007). White light interferometry in combination with a nanopositioning and nanomeasuring machine (NPMM). Proceedings of SPIE Vol. 6616. München.
Kapusi, D., Machleidt, T., Manske, E., Franke, K.-H., & Jahn, R. (2008). White Light Interferometry Utilizing the Large Measuring Volume of a Nanopositioning and Nanomeasuring Machine. Proceedings of XII. International Colloqium on Surfaces. Chemnitz.
Visuelle 3D-Überwachung für die sichere Mensch-Maschine-Kooperation
Zur barrierefreien Sicherung der Mensch-Maschine Interaktion wird der Arbeitsraum kontinuierlich von mehreren Stereokamerasystemen überwacht. Kommt der Mensch der Maschine zu nahe, soll diese ihre Bewegung verlangsamen bzw. komplett stoppen bis sich der Mensch wieder aus der Gefahrenzone entfernt. Dazu werden zunächst basierend auf den Tiefenkarten und den Farbinformationen der Stereokameras die Objekte vom Hintergrund in jeder Kameraansicht separat getrennt. Die Vordergrundobjekte werden dann anschließend aus den verschiedenen Kameraperspektiven in einen 3D-Voxelraum überführt, wo die 3D-Objekte schließlich segmentiert, identifiziert, in ein Model überführt und getrackt werden. Die beobachtete Relation der Objekte zu einander und die Prädiktion der Bewegung führt dann ggf. zum Eingriff in die Maschinensteuerung, um Kollisionen zu vermeiden.
Kapusi, D., Jahn, R., Nestler, R., & Franke, K.-H. (2014). Eye4Save – visuelle 3D-Überwachung für die sichere Mensch-Maschine-Kooperation. 17. Anwendungsbezogener Workshop zur Erfassung, Modellierung, Verarbeitung und Auswertung von 3D-Daten “3D-NordOst” (S. 123-134). Berlin: GFaI Gesellschaft zur Förderung angewandter Informatik e. V.


Auswertung von Schießscheiben für mobile Anwendungen
Für eine mobile Anwendung für Sportschützen wurde eine Softwarebibliothek für die Plattformen Windows, iOS und Android entwickelt, welche die Lage und Neigung der Zielscheibe im Bild detektiert, eine perspektivische Entzerrung vornimmt und die Schüsse auf der Zielscheibe detektiert. Eine besondere Herausforderung war dabei die Extraktion von einzelnen Einschüssen, die sich mit anderen Einschusslöchern überlappen.
Oberflächenprüfung zur Qualitätssicherung von Lebensmitteln am Beispiel Orangen
Die Aufgabe bei der automatisierten Qualitätssicherung von Lebensmitteln besteht darin, schadhafte Stellen zu identifizieren und das Lebensmittel ggf. auszusortieren. Am Beispiel der Orangen wurden zunächst interaktiv verschiedene Schad- bzw. Gut-Klassen basierend auf den Farbmerkmalen für eine Vielzahl von bildhaften Trainingsdaten angelernt, was eine pixelweise Klassifikation in die angelernten Klassen ermöglicht. Nach der Weiterverarbeitung der ikonisch vorklassifizierten Ergebnisse durch Berechnung statistischer Merkmale oder auch Formmerkmale nach Segmentierung von Pixelclustern entscheidet ein nachgelagerter Klassifikator in der zweiten Stufe ob ein Ausschusskriterium vorliegt.
Franke, K.-H., Kapusi, D., Nestler, R., Kollhoff, D., & Lucht, C. (2006). Vollständige Oberflächenprüfung von Orangen mittels Farbbildverarbeitung. 12. Workshop Farbbildverarbeitung 2006. Ilmenau.
